先日、拡張移設のためのクラウドファンディングで大成功を収めた、マイコン博物館。
現在(2024年2月12日時点)では休館中で、東青梅から青梅に移設拡張の準備中です。
でその準備のお手伝いが出来たら…と思って行ってきましたので、準備中のレアな状態を撮ってきました。
なお現在はまだ準備中ですので、オープン時はもっときれいになると思います。

今度の最寄駅は、JR青梅線の青梅駅に。以前の東青梅から1駅先になります。
青梅駅は、先週降った雪がまだ残ってました。

歩いて2分程度、信号機もなくするっと行けます。

現在は、建物の通用口から入ります。
マイコン博物館のオープンは4月を計画しているとのことですが、その時点でも通用口からの入館になる予定だそうです。
(1階の正面から入館できるのは、マイコン博物館オープン後に準備を始める、「夢の図書館」のオープンからになるそうで)
建物の正面は、こんな感じです。

この建物、以前は銀行の支店だったものです。
1階:「夢の図書館」とコワーキングスペースと、銀行ATM
2階:「マイコン博物館(主展示室・特別展示室)」と工作室とテレワークスペース
3階:「模型とラジオの博物館」と、他のテナント
という構成になります。
まずは、2階から。



現時点では、2階は展示棚とソファ等が並んでいます。内装工事はだいたい完了しているようですね。
事務室という雰囲気がやわらぐようにと、天井にシーリングファンが付いています。カーペットも新たに敷いたもので照明も明るいので、ここが元銀行だったのか、という感じはしなかったです。
まだ展示棚にはほとんど展示物を置いてない状態で、仮置きしてみて様子を見ているところ、とのことでした。
東青梅時代と比べて棚がかなり増えましたので、以前は展示できなかったたくさんの収蔵品が、これでお目見えできそうです。すごく楽しみです。
ただこれでも、まだ収蔵品を展示できるわけではなさそうとのことで(!)。青梅あたりでさらに広い物件があればさらに移転もありえるかも?というほどの寄贈品の数だそうです。
で、以前は展示できなかったけど今回展示できるようになるものとして、家庭用ゲーム機(コンシューマーゲーム機)が計画されてます。

まだ開梱作業が始まってないので、まだまだ増えるんだと思います。
動くゲーム機であれば、ここで遊べるようにされるとのことです。楽しみですね~。
部屋の中央には、ソファ・テーブルと、伝説のゲームマシン「インベーダー」があります。このインベーダー、なんと100円を入れると動きます。

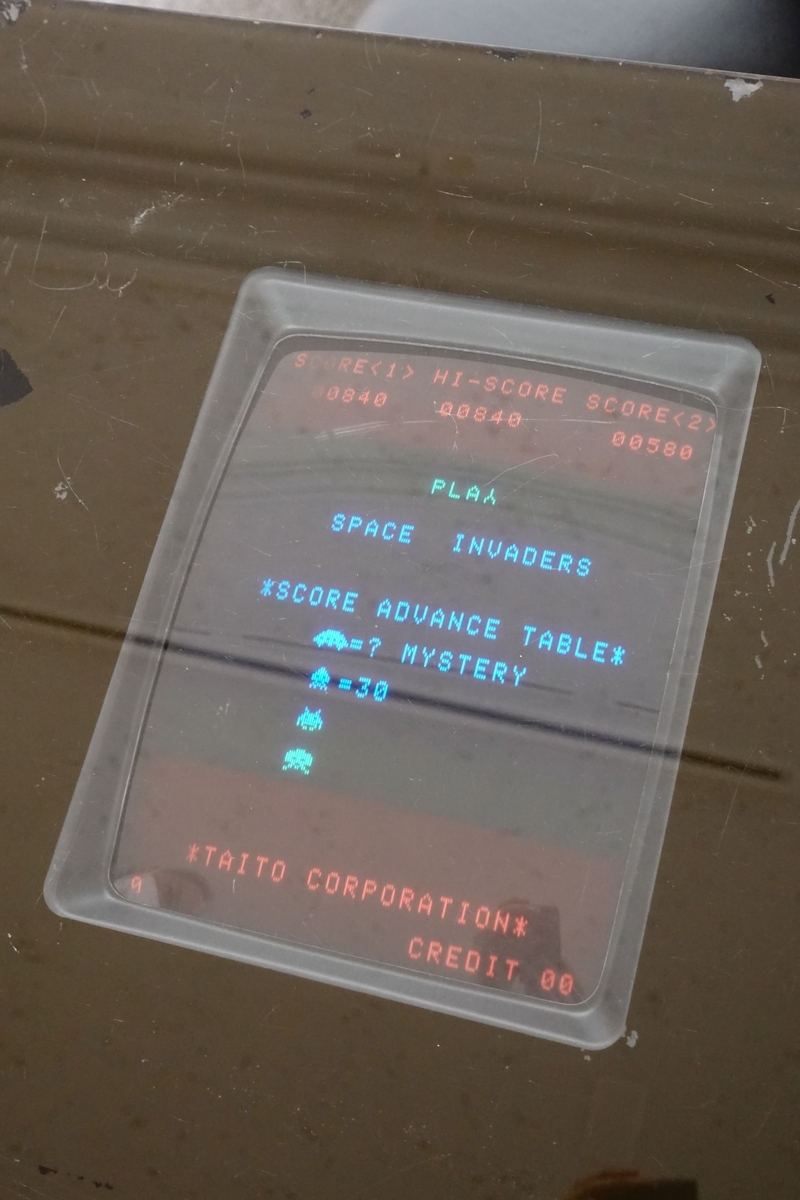
この建物は元銀行なので、お客さんが殺到して100円玉であふれかえっても床が抜けることはなさそう。
2階のマイコン博物館にも、「夢の図書館」の一部の雑誌が置かれる予定です。

地震が来ても本棚が倒れて怪我をしないように、本棚は壁とがっちり固定してました。
工作室、広くなりました。快適です。

特別展示室

ここは金庫だったところで、分厚い扉があります。
でその金庫の中が、特別展示室になって、より歴史的な記念碑的なマシンが展示されるそうです。まだ物置状態ですが。

テレワーク室

いい椅子が使用されてます。
東青梅のときも、テレワークで利用される方が結構おられたということで、より本格的なテレワーク室になりました。個室とかブースとかではないですが。
クラウドファンディングの成功を受けて、準備は着々と進んでいるようです。
楽しみですね!
階段を上って3階は「模型とラジオの博物館」になります。


飛行機や船の模型が、棚や天井に展示されてます。
黄色い飛行機はとある方が中学生時代に作られたもので、その方はその後日本の航空機産業(ビジネスが続いているメーカー)にも尽力されてるとのこと。
子供の時の体験(成功・失敗にかかわらず)ってやはり重要だなと感じました。
完成品だけでなく、作製中のもの、そして箱に入ったままの模型キットも。

模型キットの箱が棚の上のほうに積まれた状態になってますが、これは模型店をイメージされたとのこと。懐かしいなぁ~。
ちなみにこの時代(どの時代?)のキットは、プラモデルとは違って、材料と図面があるだけ、というものです。
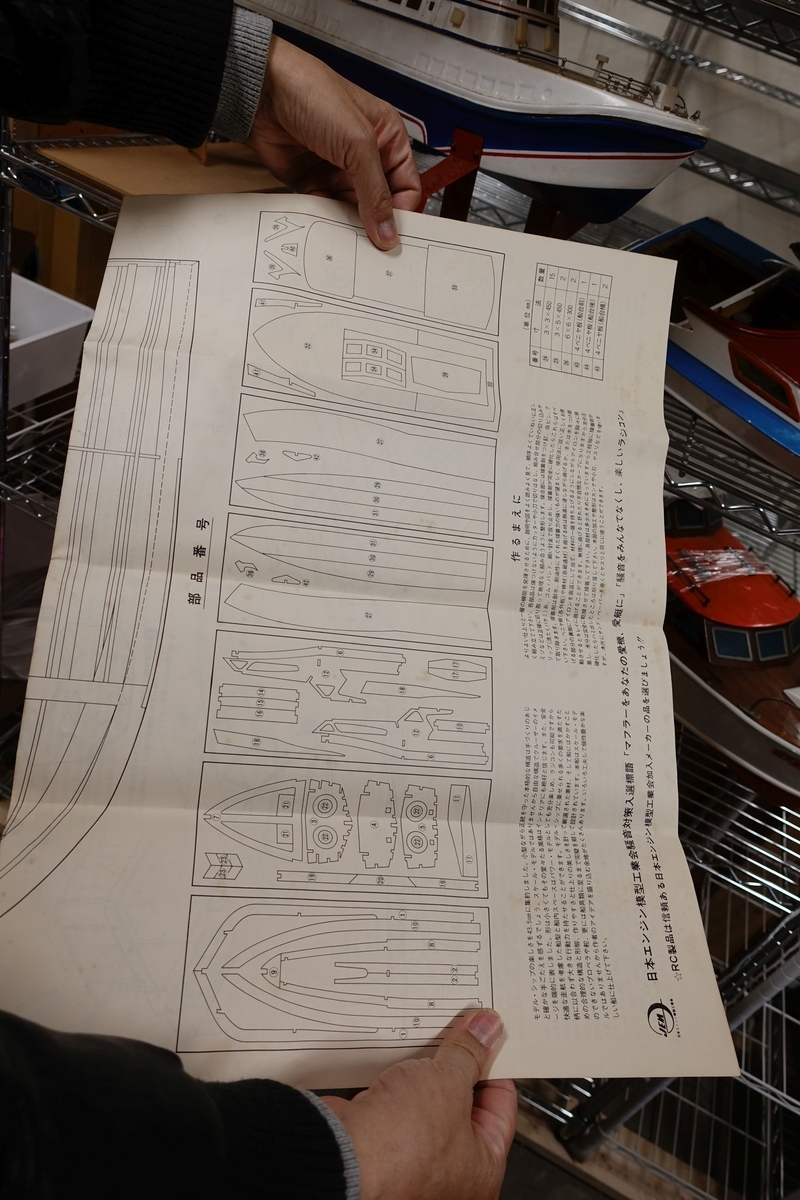
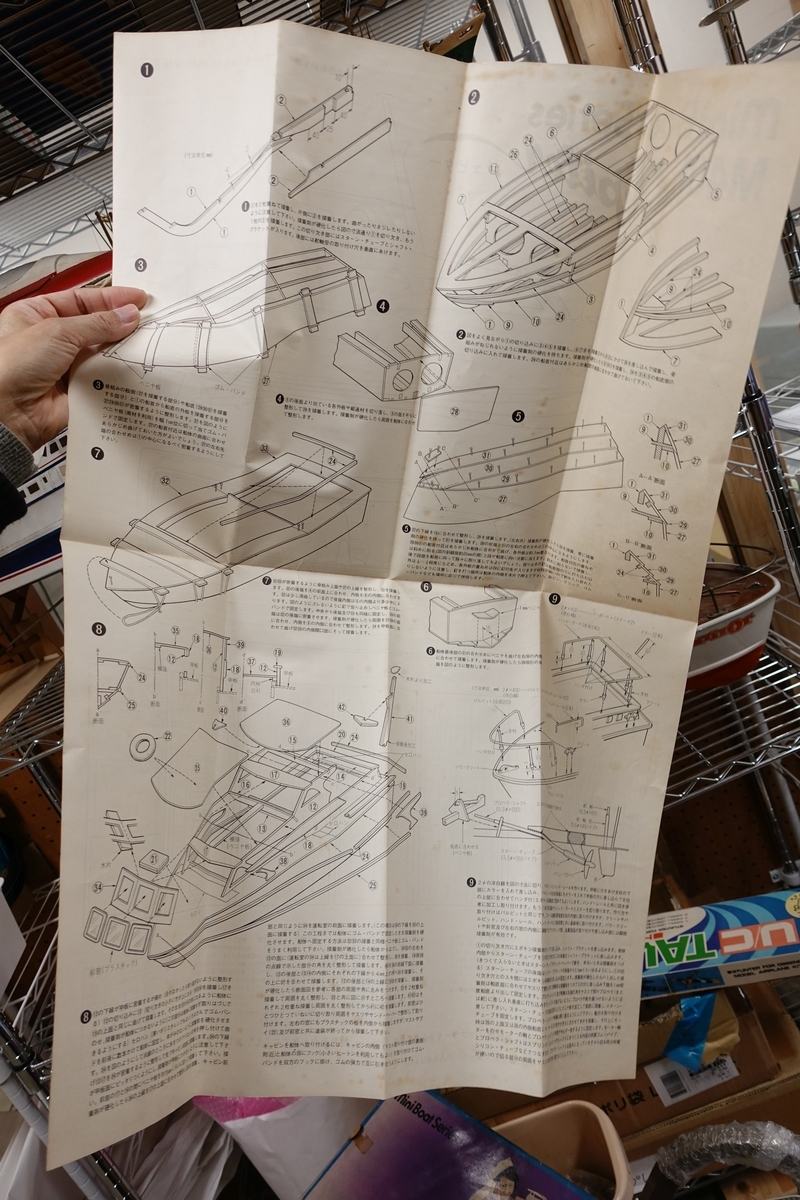
色は付いてないし、曲げてもいないし、切られてもいない。つまりほとんどを、自分で考えて、自分で手を動かして、組み立てるというもの。これをチャレンジしようとし当時の子供たちはすごいな…、気合が違う。
んで、この部屋は内装が以前の銀行時代そのままで、壁が防音仕様になってます。館長曰く、かつては電話交換機室として使用していたものだろう、とのこと。
模型室の隣が、無線機室です。


まぁ、まだ棚が並んでるだけですね。
今度は階段を下りて、1階へ。
1階は「夢の図書館」となるところですが…



収蔵品がすごい量。
夢の図書館のオープンは、まだまだ先ですね。マイコン博物館の準備を優先されてるのがよく分かります。
なお現在はまだ準備中につき、オープン時の様子とは大きく異なる(はず)ので、あくまでも準備中の様子の記録ということで。
たくさんの方がクラウドファンディングに賛同されたので、棚や内装が整備されてますね!
たくさんの棚が、これからのたくさんの新たな展示を予感させてくれて、オープンがとても楽しみです。
周辺情報
駐車場
駐車場は、建物の裏手(通用口側)にコインパーキングがあります。2024年2月時点では上限900円でした。コインパーキングは青梅駅前にもありますので、そちらを利用するのもありかも。

ちなみに2024年2月時点では、建物正面のすぐにあるコインパーキングは上限が1,100円でした。
料金は随時変更されると思いますので、相場感のご参考までに。
ランチ情報
マイコン博物館のすぐ近くに、「青梅食堂」というお店があります。暖簾もかかってるので、営業中だとすぐわかります。

で、その外観からは想像できないようなメニューでして。
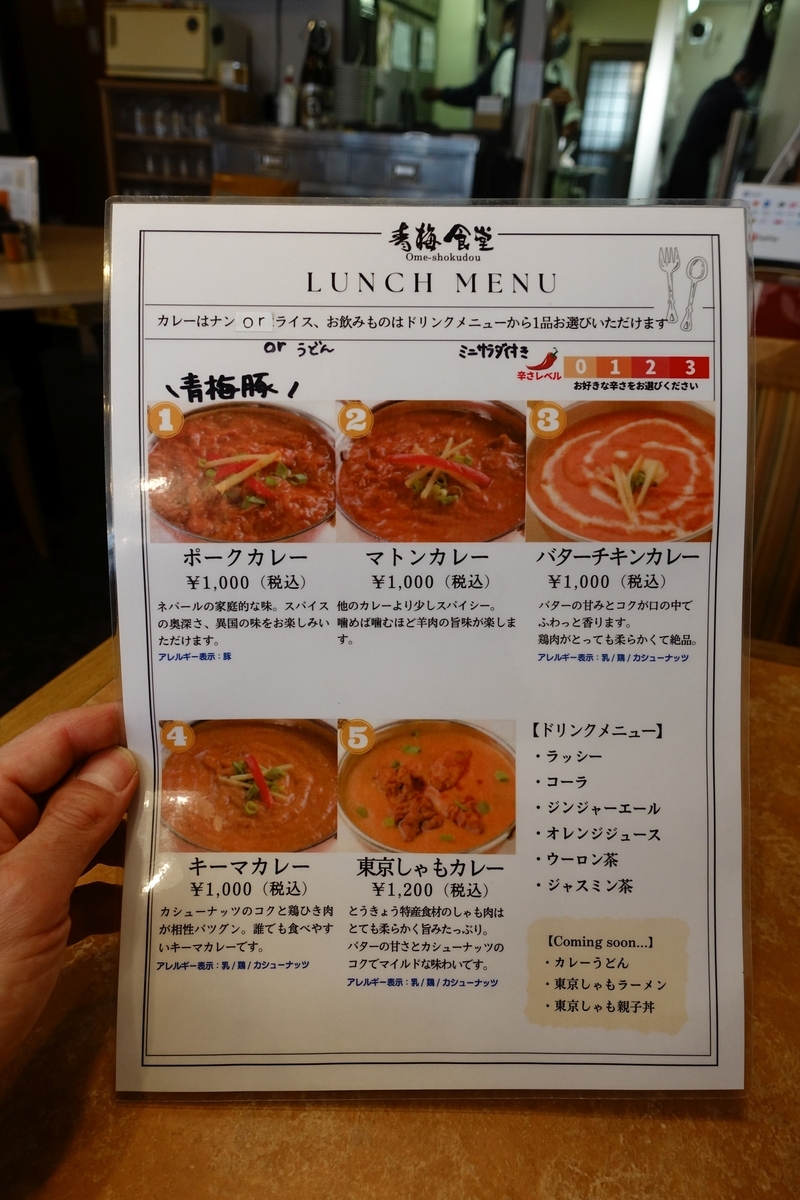

うまかったです。
ちなみにナンはお代わり無料ではありません(ナン単品を注文することになります)。でも1枚でかなりおなか一杯になると思います。
まだ食べてないのですが、ほかにもいろいろお店があって、
うどん屋さんがあったり(行列できてました)、

クラフトビールが飲めるお店にランチメニューがあったり、

青梅駅を出てすぐ左手(マイコン博物館と逆方向)にある、「まちの駅青梅」にも、面白いメニューがありました。

「まちの駅青梅」では、地元のいろんなものが買えそうです。注意点としては、「マイコン博物館の帰りに寄ってみよう」としてたら寄るのを忘れて電車に乗っちゃう、ということあります(実体験)ので、青梅駅に降りたら最初に寄ってってもいいかもです。

あと町のところどころに、レトロ看板をモチーフに猫風にアレンジした看板がありました。


 CHE-TPHU2WN")
 黒球付き 熱中症指数モニター みはりん坊プロ AD-5698")